.386 ; Tells MASM to use Intel 80386 instruction set.
.MODEL FLAT ; Flat memory model
option casemap:none ; Treat labels as case-sensitive
.CONST ; Constant data segment
.STACK 100h ; (default is 1-kilobyte stack)
.DATA ; Begin initialized data segment
.CODE ; Begin code segment
_main PROC ; Beginning of code
ret
_main ENDP
END _main ; Marks the end of the module and sets the program entry point label
Assembly and C Code Compared
Some simple high-level language instructions can be expressed by a single assembly instruction:
Assembly Code C Language Code
---------------- ---------------------------------
inc result ++result; // Increment value
mov size, 1024 size = 1024; // Assign value
and var, 128 var &= 128; // Apply AND bitmask
add value, 10 value += 10; // Addition
More Assembly and C Code
Most high-level language instructions need more than one assembly instruction:
Assembly Code C Language Code
---------------- ---------------------------------
mov AX, value size = value; // Assign variable
mov size, AX
mov AX, sum sum += x + y + z; // Arithmetic computation
add AX, x
add AX, y
add AX, z
mov sum, AX
Assembly vs. Machine Language
Assembly Language uses mnemonics, digital numbers, comments, etc.Machine Language instructions are just a sequences of 1s and 0s.
Readability of assembly language instructions is much better than the machine language instructions:
Assembly Language Machine Language (in Hex)
----------------- --------------------------
inc result FF060A00
mov size, 45 C7060C002D00
and var, 128 80260E0080
add value, 10 83060F000A
Controlling Program Flow
Just as in high-level language, you want to control program flow.The JMP instruction transfers control unconditionally to another instruction.
JMP corresponds to goto statements in high-level languages:
; Handle one case
label1: .
.
.
jmp done
; Handle second case
label2: .
.
.
jmp done
.
.
done:
Conditional Jumps
Conditional jump is taken only if the condition is met.Condition testing is separated from branching.
Flag register is used to convey the condition test result.
For example:
cmp ax, bx
je done
.
.
done:
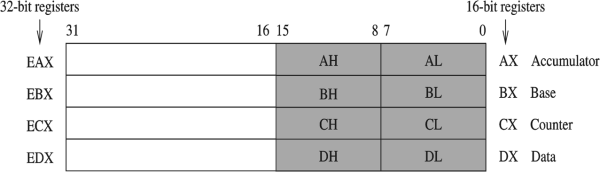
General-Purpose Registers
|
Similarly, AL, DL, CL, and BL represent the low-order 8 bits of the registers.
Since the processor accesses registers more quickly than it accesses memory, you can make your programs run faster by keeping the most-frequently used data in registers.
Typical Uses of General-Purpose Registers
| Register | Size | Typical Uses |
|---|---|---|
| EAX | 32-bit | Accumulator for operands and results |
| EBX | 32-bit | Base pointer to data in the data segment |
| ECX | 32-bit | Counter for loop operations |
| EDX | 32-bit | Data pointer and I/O pointer |
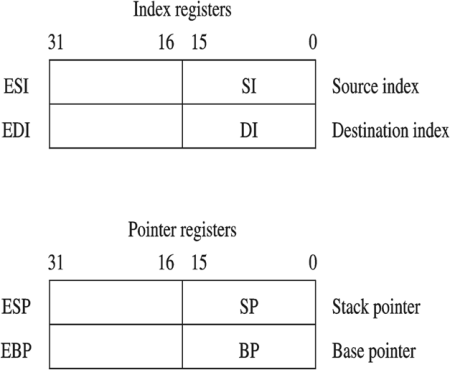
| EBP | 32-bit | Frame Pointer - useful for stack frames |
| ESP | 32-bit | Stack Pointer - hardcoded into PUSH and POP operations |
| ESI | 32-bit | Source Index - required for some array operations |
| EDI | 32-bit | Destination Index - required for some array operations |
| EIP | 32-bit | Instruction Pointer |
| EFLAGS | 32-bit | Result Flags - hardcoded into conditional operations |
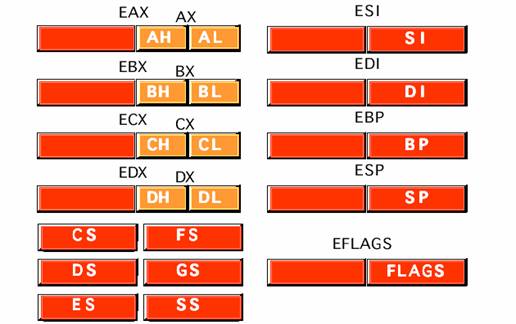
x86 Registers
Four 32-bit registers can be used as- Four 32-bit registers EAX, EBX, ECX, EDX.
- Four 16-bit registers AX, BX, CX, DX.
- Eight 8-bit register AH, AL, BH, BL, CH, CL, DH, DL.
Some registers have special use...
- ...ECX for count in LOOP and REPeatable instructions
x86 Registers, Cont
|
x86 Control Registers
EIP Program counter (Instruction Pointer)EFLAGS is set of bit flags:
- Status flags record status information about the result of the last arithmetic/logical instruction.
- Direction flag stores forward/backward direction for data copying.
- System flags store
- IF interrupt-enable mode
- TF Trap flag used in single-step debugging.
- IF interrupt-enable mode
MOV, Data Transfer Instructions
The MOV instruction copies the source operand to the destination operand without affecting the source.Five types of operand combinations are allowed with MOV:
Instruction type Example
-------------------------- ------------------
mov register, register mov DX, CX
mov register, immediate mov BL, 100
mov register, memory mov EBX, [count]
mov memory, register mov [count], ESI
mov memory, immediate mov [count], 23
Note: the above operand combinations are valid for all instructions that require two operands.
Ambiguous MOVes: PTR and OFFSET
For the following data definitions.DATA
table1 DW 20 DUP (?)
status DB 7 DUP (0)
.CODE
mov EBX, table1 ; "instruction operands must be the same size"
mov ESI, status ; "instruction operands must be the same size"
mov [EBX], 100 ; "invalid instruction operands"
mov [ESI], 100 ; "invalid instruction operands"
The above MOV instructions are ambiguous.
Not clear whether the assembler should use byte or word equivalent of 100.
Better:
mov EBX, OFFSET table1
mov ESI, OFFSET status
mov WORD PTR [EBX], 100
mov BYTE PTR [ESI], 100
INC and DEC Arithmetic Instructions
Format:inc destination
dec destination
Semantics:
destination = destination +/- 1
The destination can be 8-bit, 16-bit, or 32-bit operand, in memory or in register.
No immediate operand is allowed.
Examples:
inc BX ; BX = BX + 1
dec [value] ; value = value - 1
ADD Arithmetic Instruction
Format:add destination, source
Semantics:
destination = (destination) + (source)
Examples:
add ebx,eax
add [value], 10h
ADD vs. INC
Note thatinc eaxis better than
add eax, 1
INC takes less space.
Both INC and ADD execute at about the same speed.
SUB Arithmetic Instruction
Format:sub destination, source
Semantics:
destination = (destination) - (source)
Examples:
sub ebx, eax
sub [value], 10h
SUB vs. DEC
Note thatdec eaxis better than
sub eax, 1
DEC takes less space.
Both execute at about the same speed.
CMP instruction
Format:cmp destination, source
Semantics:
(destination) - (source)
The destination and source are not altered.
Useful to test relationship such as < > or = between the two operands.
Used in conjunction with conditional jump instructions for decision making purposes.
Examples:
cmp ebx, eax
je done ; jump if equal
..
done:
..
Unconditional Jumps
Format:jmp label
Semantics:
- Execution is transferred to the instruction identified by the label.
- Infinite loop example:
mov eax, 1
inc_again:
inc eax
jmp inc_again
mov ebx, eax ; this will never execute...
Conditional Jumps
Format:jcondition label
Semantics:
- Execution is transferred to the instruction identified by label only if condition is met.
- Testing for carriage return example:
; Assume that AL contains input character.
cmp al, 0dh ; 0dh = ASCII carriage return
je CR_received
inc cl
..
CR_received:
Conditional Jumps, Cont
Some conditional jump instructions treat operands of the CMP instruction as signed numbers:je jump if equal
jg jump if greater
jl jump if less
jge jump if greater or equal
jle jump if less or equal
jne jump if not equal
Conditional Jumps, Cont
Some conditional jump instructions can also test values of the individual CPU flags:
jz jump if zero (ZF = 1)
jnz jump if not zero (ZF = 0)
jc jump if carry (CF = 1)
jnc jump if not carry (CF = 0)
jz is synonymous for je
jnz is synonymous for jne
LOOP Instruction
Format:
loop target
Semantics:
- Decrements ECX and jumps to target, if ECX > 0
- ECX should be loaded with a loop count value before loop begins.
|
|
|
Logical Instructions
Format:
and destination, source
or destination, source
xor destination, source
not destination
Semantics:
- Perform the standard bitwise logical operations.
- Result goes to the destination.
TEST is a non-destructive AND instruction:
test destination, source
TEST performs logical AND but the result is not stored in destination (similar to CMP instruction.)
Logical Instructions, Cont.
Example of testing the value in AL for odd/even number:
test al, 01h ; test the least significant bit
je even_number
odd_number:
; process odd number
..
jmp next
even_number:
; process even number
..
next:
Shift Instructions
Shift left format:shl destination, count
shl destination, cl
Shift right format:
shr destination, countwhere count is an immediate value.
shr destination, cl
Semantics:
- Performs left/right bit-shift of destination by the value in count or CL register.
- CL register contents is not altered.
SHL and SHR Shift Instructions
Bit shifted out goes into the carry flag CF.Zero bit is shifted in at the other end:


Shift Instructions Examples
Count is an immediate value:
shl eax, 5
Specification of count greater than 31 is not allowed.
If greater, only the least significant 5 bits are actually used.
CL version of shift is useful if shift count is known at run time,
- e.g. when the shift count is a parameter in a procedure call.
Only CL register can be used.
Shift count value should be loaded into CL:
mov cl, 5
shl ax, cl
Rotate Instructions
Two types of rotate instructions:
- Rotate without carry:
- ROL (ROtate Left)
- ROR (ROtate Right)
- ROL (ROtate Left)
- Rotate with carry:
- RCL (Rotate through Carry Left)
- RCR (Rotate through Carry Right)
- RCL (Rotate through Carry Left)
Rotate instruction operand is similar to shift instructions and supports two versions:
- Immediate count value
- Count value is in CL register
ROL and ROR, Rotate Without Carry


RCL and RCR, Rotate With Carry


EQU directive
EQU directive eliminates hardcoding:
NUM_OF_STUDENTS EQU 90
..
mov ecx, NUM_OF_STUDENTS
No reassignment is allowed.
Only numeric constants are allowed.
Defining constants has two main advantages:
- Improves program readability
- Helps in software maintenance.
mov ecx, 90 ; HARDCODING is less readable and harder to maintain
Multiple occurrences can be changed from a single place
The convention is to use all UPPER-CASE LETTERS for names of constants.
EQU Directive Syntax
name EQU expression
Assigns the result of expression to name.
The expression is evaluated at assembly time.
More examples:
NUM_OF_ROWS EQU 50
NUM_OF_COLS EQU 10
ARRAY_SIZE EQU NUM_OF_ROWS * NUM_OF_COLS
No comments:
Post a Comment